ご参加ありがとうございました。イベントは終了いたしました。
趣旨説明
複雑な迷路を高速で走り抜けるマイクロマウス。
ロボット好きな人なら、インターネットの動画で見たこともあるでしょう。
「面白そう! でも、ハードル高くてムリムリ」
ロボット経験者の多くがそう言って、マイクロマウスを遠巻きに眺めています。
実は、マイクロマウスって、誰でもできるんですよ。
そもそも、数あるロボット競技会の中でも、マイクロマウスはすごくシンプルなんです。
なんていっても、動くのはモーターだけ。機構がシンプル!
前進後退旋回ができれば、OK!
迷路解析のアルゴリズムを載せれば、競技に参加できます。
全日本大会には、中学生が部活で製作したマイクロマウスで出場しているくらいです。
初心者でも始められるロボコンなんです。
ただ、そういう情報がなかなか表にでないのです。
インターネット上で動画公開されているのは、「超速っ!」なトップレベルの人たちの走行だけですから……
その動画だけを見ていると、「自分には、ムリ……」と思ってしまうのもムリありません。
そんな誤解をときたくて、マイクロマウス関西支部で「マイクロマウス体験講座」を開催することにしました。
マイクロマウスロボットの開発を体験できる1日講座です。
教材には、標準的マイクロマウスロボットキットのPi:coクラシック(完成品)を使います。
参加者は、各自ノートPCを持参し,pi:coクラシックの開発環境導入を講座内で行います。めんどうな環境導入を、講座で教えてもらえながら終わらせることができます。
講師は、松井祐樹さん(京都大学機械研究会)。松井さんは、第35回マイクロマウス全国大会で2位入賞の実力者です。
松井さんの解説で、支部サーキット(外周走行)の基本になるPIDゲインのチューニングを体験します。
PゲインやDゲインなどを変化させると,どのように走行の挙動が変化するか?
同ゲインであっても,走行速度をあげていくとどのような問題が起きるのか?
プログラムを調整、ロボットの挙動を観察してマイクロマウスロボットの開発を体験できます。
講座の最後では,受講者同士のサーキット競技を行い,マイクロマウス競技会の疑似体験も行います。
本講座では,
教材のpi:coクラシックをレンタルして行うので、
「買ってみたら、作ってみたら、取り組んでみたらイマイチだった」を防げるメリットがあります。
走行はどんなロボット競技でも基本的な技術です。
他のロボット競技経験者や、電子工作愛好者、ハードとソフトの両方を扱えるようになりたい方もぜひどうぞ!
速く正確に走ることにかけて、マイクロマウスはどんなロボットにも引けはとりません。トップクラスのマウサー(マイクロマウス製作者)が、どのような制御をしているのか? 講座で学んでください。
分からないところがあれば、講師やスタッフが対応いたしますので、初心者でも安心してご参加できます。
講座内容
主催者:マイクロマウス委員会関西支部
開催日時:4月25日(土) 11:00~17:00(受付開始 10:30)
会場:共立電子セミナールーム(アクセス)
共 催:京都大学機械研究会協力株式会社アールティ,共立電子産業株式会社
参加費:無料
定員:8名→10名に増枠,スタッフ人数:6名(福井(取りまとめ),松井(講師),三月兎(会場・事務),久住(会場・事務),久保田(当日スタッフ),伊藤(当日スタッフ))
設備WiFi(共立電子様),pi:coクラシックロボット(アールティ様),クラシック迷路(関西支部)
スケジュール
10:30 受付
11:00-12:30 インストラクション、環境導入講座
12:30-13:30 昼食休憩
13:30-14:00 直進制御実験:P制御,PID制御
14:10-15:40 支部サーキット実験:直進プログラムと回転プログラムの組み合わせ
15:50-16:30 支部サーキットプチ大会
16:30-17:00 解説・雑談(この時間にpi:coクラシックやはんだ小手などを購入可能)
17:00-18:00 完全撤収
マイクロマウス1日体験講座 申し込みフォーム
定員に達したため参加申込みを締め切りました。
多数のお申し込みありがとうございました。
開催報告
当日は9人の方に受講していただきました。その様子を写真とともに報告いたします。
講演に使用したスライドはこちら(pdfファイル)

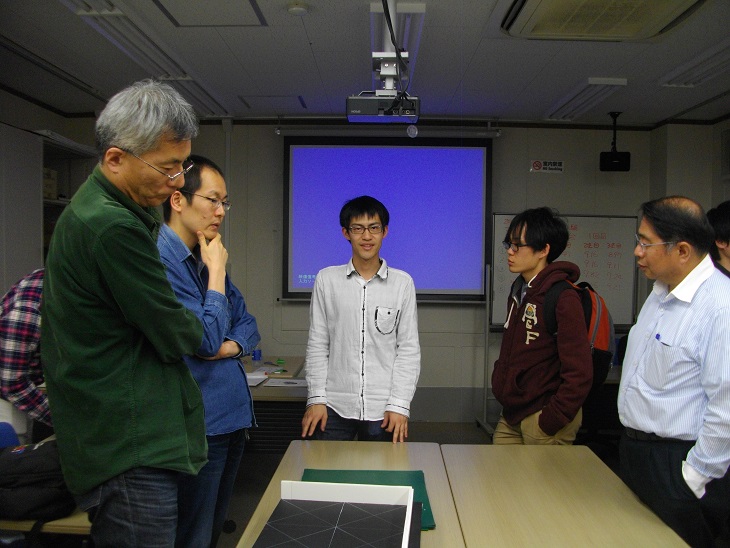
はじめは講師によるマイクロマウスの紹介。歴史や競技者層、規定について説明しました。

次に、参加者の方に開発環境をインストールしていただきました。ロボットとの通信確立中。

講師によるデモ。難しい迷路ですがクリア!
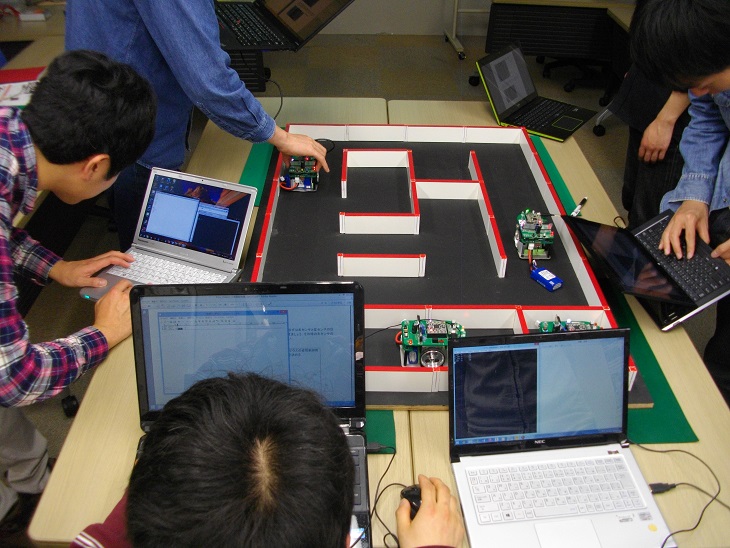
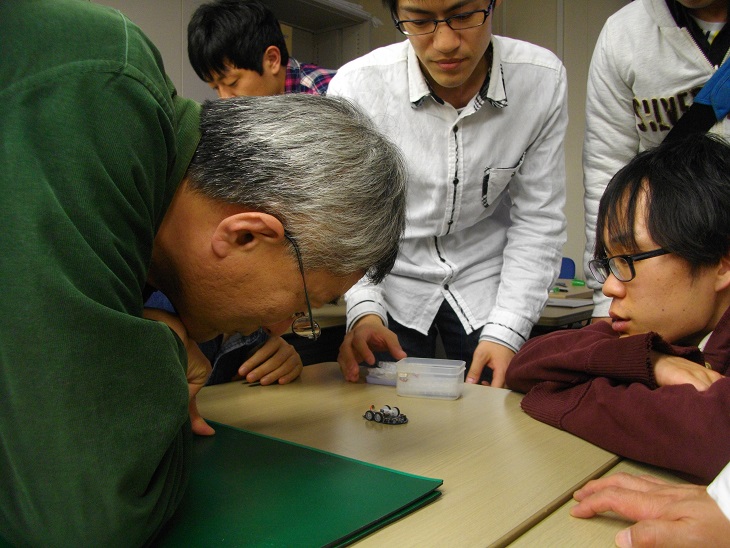
午後からは実際にキット「Pi:coクラシック」を使った実習。はじめにセンサが壁の有無を読み取っていることを実感してもらいました。
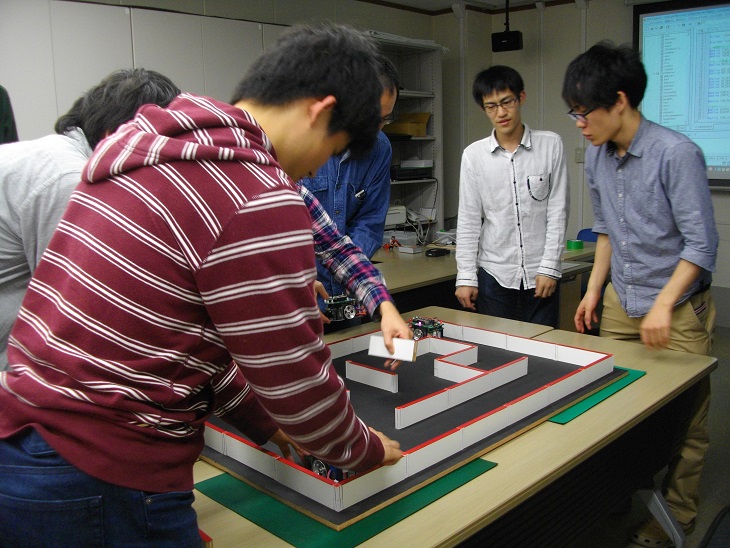
次に、実際に迷路の直進走行に挑戦。スピードを上げても安定するよう調整。

講師の普段の調整法を動画で紹介。ハイスピードカメラで撮った映像に関心が集まる。
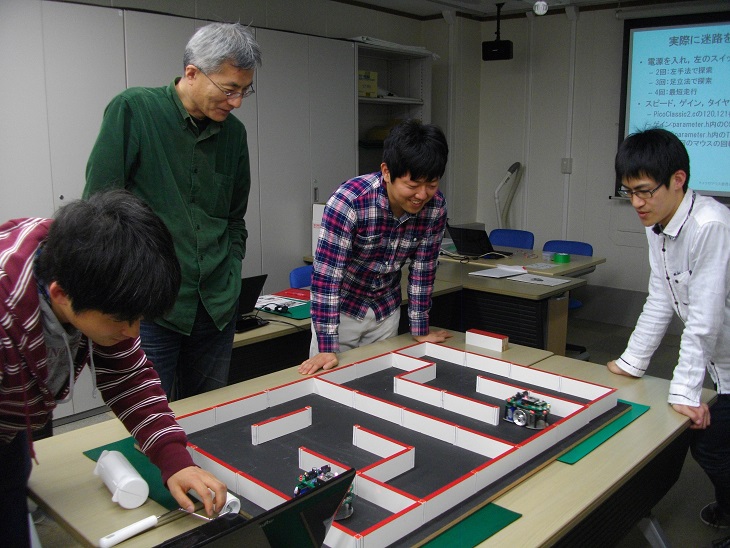
最後に実際に迷路を走行しながらゴールを目指し調整。マウスの賢さ、最短走行の速さを体感してもらいました。

調整中①

調整中②

調整中③
調整中④
調整中⑤
調整後は腕試し!みんなでプチ競技会。
一度挑戦してもらい、その後しばらく調整していただいてから第2ラウンドを開きました。
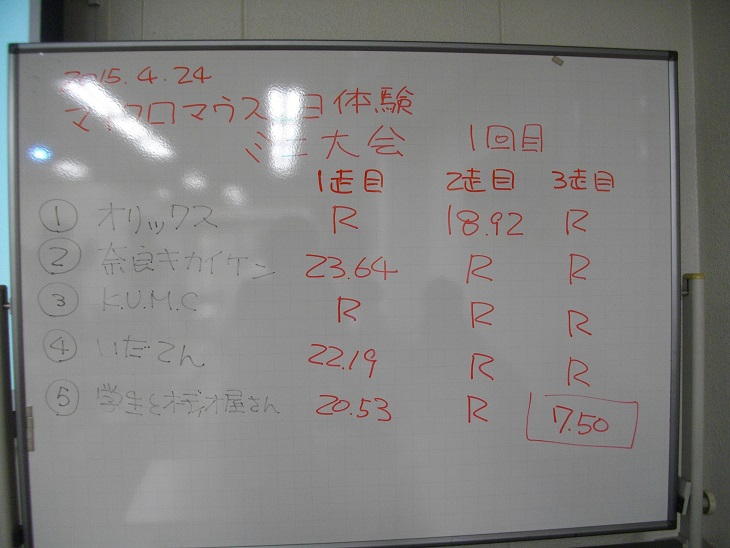
競技結果その①
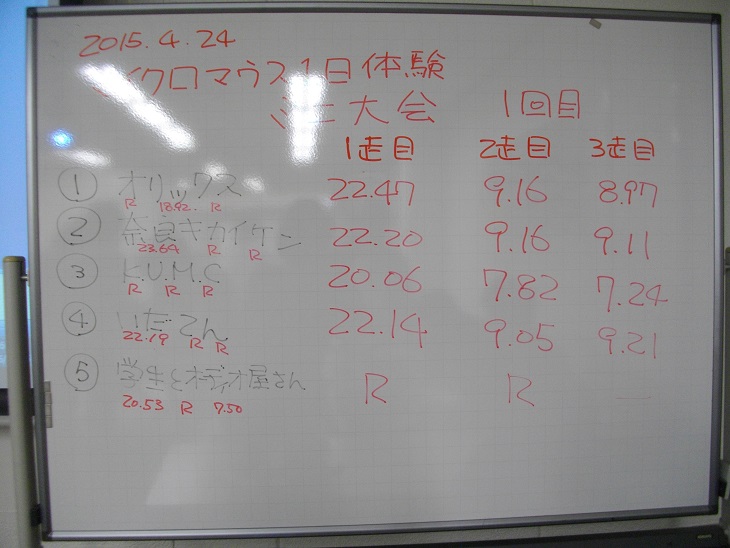
競技結果その②
プチ大会について講評、マウスについて議論
マシンを囲んで議論その①
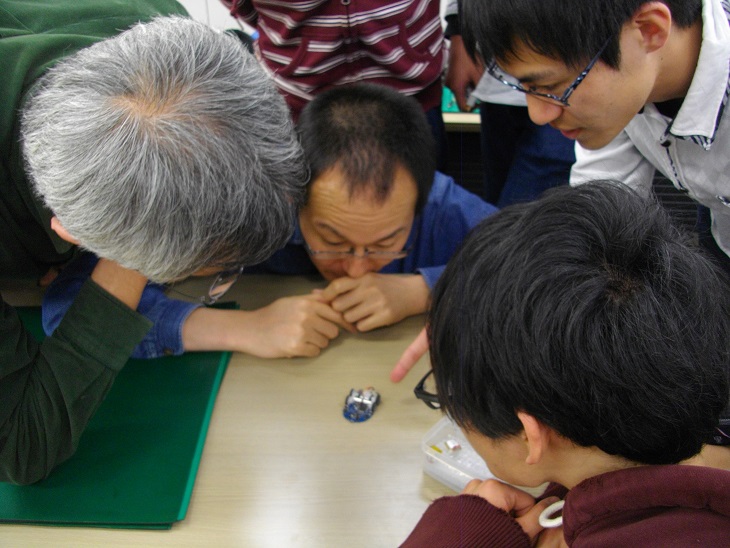
マシンを囲んで議論その②
謝辞
株式会社アールティ様には、体験会の意義をご理解いただきキットやバッテリ、充電器をお借りし、またマニュアルやサンプルプログラムの提供を含め様々なかたちでサポートをしていただきました。この場を借りて御礼申し上げます。
共立電子産業株式会社様には、支部の活動にご理解いただき開催場所や設備を提供していただきました。この場を借りて御礼申し上げます。